
Design of Unmanned Ground Vehicle (UGV) with PID controller
- Mohamed Mohamed-Ahmed

- Mar 3, 2022
- 1 min read
Updated: Mar 23, 2022
This project was done as my M.Sc. Final project in 2017.
The main aim of the project is to design Unmanned Ground Vehicle (UGV) robot where it is capable of navigating a complex environment and can avoid obstacles using Simultaneous Localisation And Mapping (SLAM) to map and localize the unknown landscape and the Navigation_Stack was used to provide a target to reach, plans a path while avoiding obstacles.
What motivated me to do this project is that the UGV robot is a well-known project where this project faces challenges like terrain navigation, localisation, obstacle avoidance and map creation. This project is mainly used in rescue missions, inhabitable environments like nuclear plant operations and space exploration. However, there is a possibility that the robot might encounter a power management issue where some power would be wasted on one or more motors which would cause the robot to deviate from its path. Therefore, it would be beneficial for UGV to have a control system to help maintain and regulate the voltage transmitted to the motors of the UGV robot which will help minimize the deviation in the motion of the UGV robot.
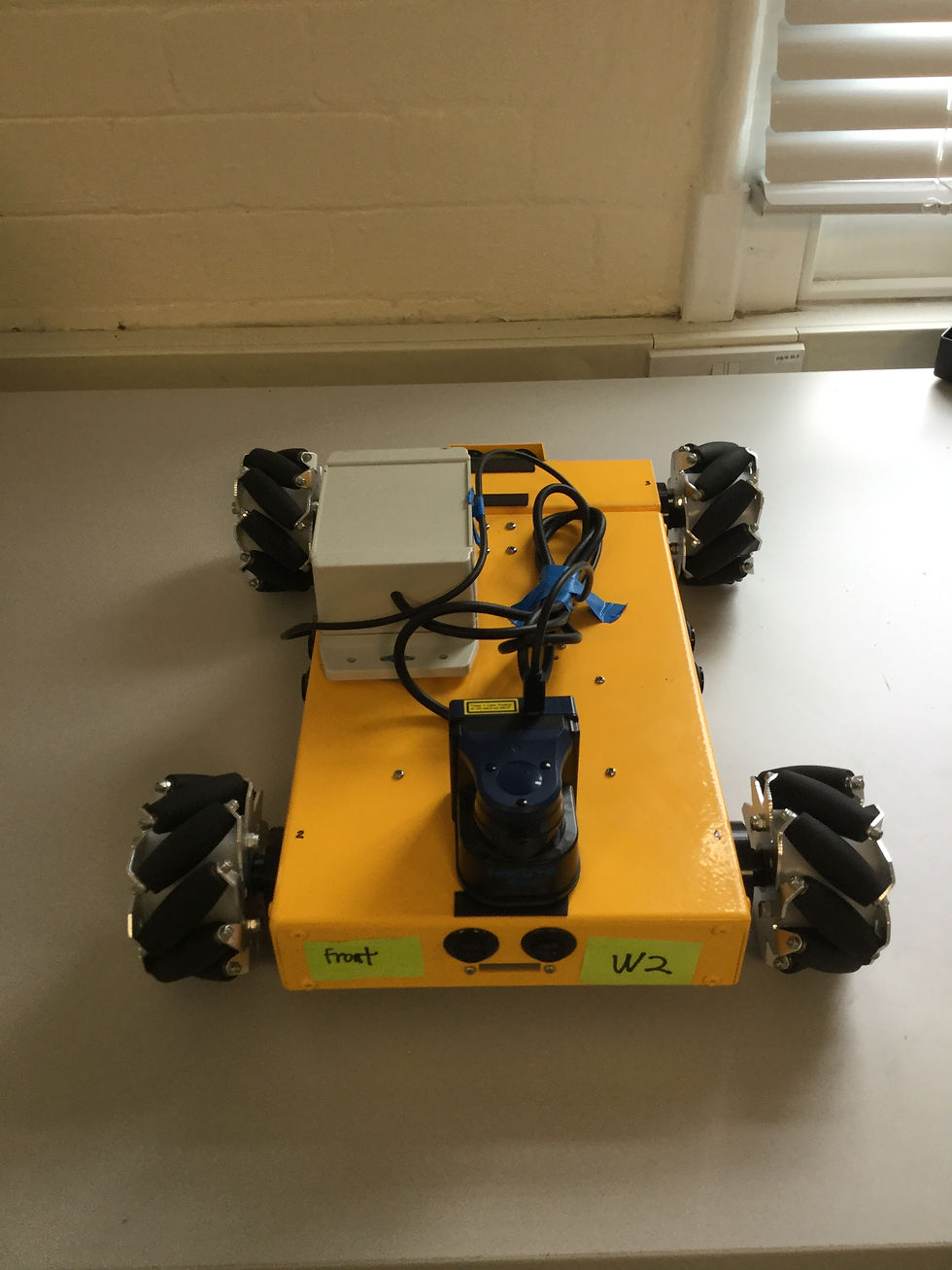
The main components used in this project are the following:
Nexus Robot
Nexus Duino microcontroller
Nexus Duino I/O expansion shield
Raspberry Pi 3
DC motor
Hokuyo Laser
B6286 Step-Up Adjustable Boost converter board
2A fuse
4 series Ni-MH battery (each cell => 3300mAh and 1.2V)
The following figures display the connections for UGV.




For further details of this project, it can be found in my GitHub repository with a Full PDF version of the design project:


Comments